科学家最新研究:让机器人通过“照镜子”实现自我认知突破
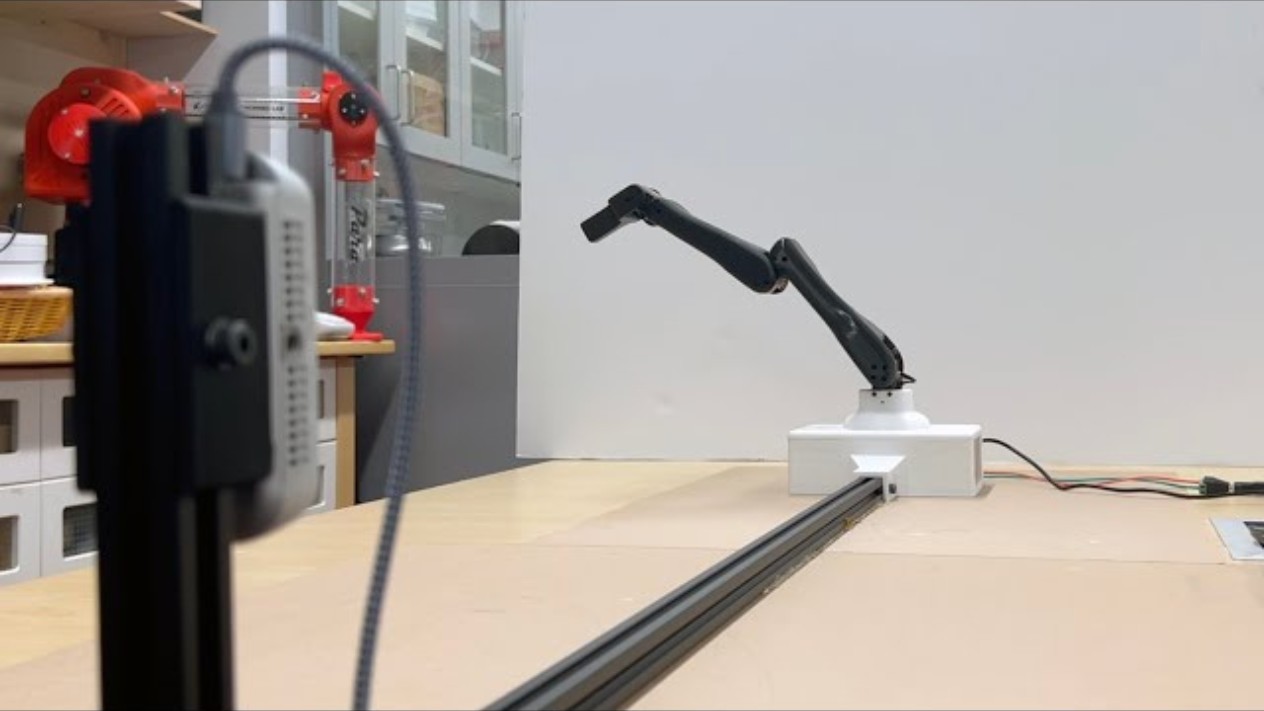
IT之家 3 月 3 日动态,哥伦比亚大学板滞工程系主任霍德・利普森(Hod Lipson)指导的一支钻研团队基于视觉练习取呆板人岁月的接集启发了一种新战略,使呆板人恐怕经历看察自己疏通,修立对于自己组织和疏通式样的明白。
这项岁月的中心在于运用普遍 2D 摄像头拍摄的视频来让呆板人经历自尔看察修立疏通学自尔认识,进而使其完满举措并猜测本人的空间疏通,以至无需人类做预即能从败坏中克复,为自决呆板人岁月滋长启辟齐新道径。
钻研团队运用深度神经搜集和普遍摄像头,胜利地让呆板人自决创造三维疏通学模子。这类步骤使呆板人恐怕像人类照镜子绝对,经历视觉感知自己,明白并相宜自己的疏通式样。
经历启发“自尔认识”,这些呆板人也许具备真现自动化,使其在家庭、工场和灾地等实际境况中更自力、更相宜、更高效。
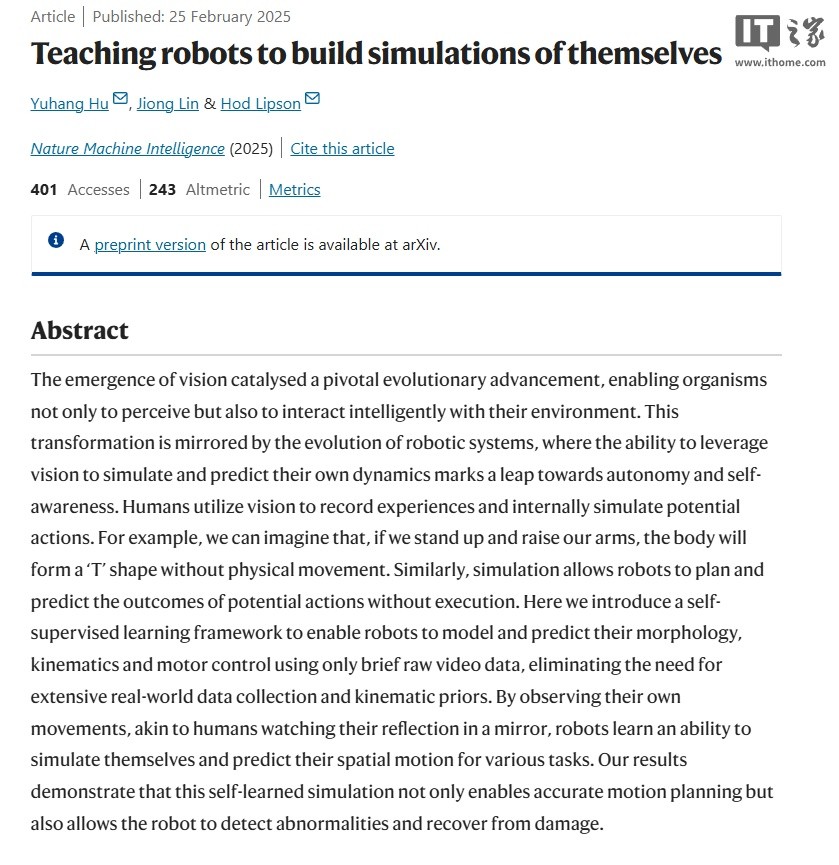
关系钻研效果已于 2 月 25 日公布在《天然・呆板智能》上(IT之家附 DOI:10.1038 / s42256-025-01006-w)。
这类自尔修模手腕在真际运用中具备沉要意旨。比方,假使一台呆板人在实行工作时受损,保守步骤能够须要人为做预入行建复。而具有自尔修模手腕的呆板人,也许经历看察自己受损状况,调理疏通式样,接续告竣工作,普及了体例的鲁棒性和切实性。
利普森讲解表白,“尔们人类没法从来像看护婴儿那样,为呆板人建理败坏部件、调理本能参数。倘使呆板人要实正表现听命即必需学会自尔照护,这恰是自尔修模岁月云云沉要的本因。”
这项钻研以哥伦比亚大学两十年的钻研为原形。在此功夫,钻研职员从来在启发呆板人运用摄像头和其余传感器创造自尔模子的步骤。
2006 年,他们的呆板人只可天生简洁的模子。十年后,他们运用多个摄像头创造出了更完满的高保实型号,而此刻终归初次胜利运用单个程序摄像头的短视频片断修立了呆板人的完好疏通模子。
利普森讲解声明讲:“尔们人类天资即对于本人的体魄有直觉的看法,能在真际行径前预料改日状况并评价动作结果,尔们的最终宗旨是让呆板人具有宛如的自尔设想手腕。一朝能猜测改日,其后劲将无可限量。”